Project Overview
Problem Statement
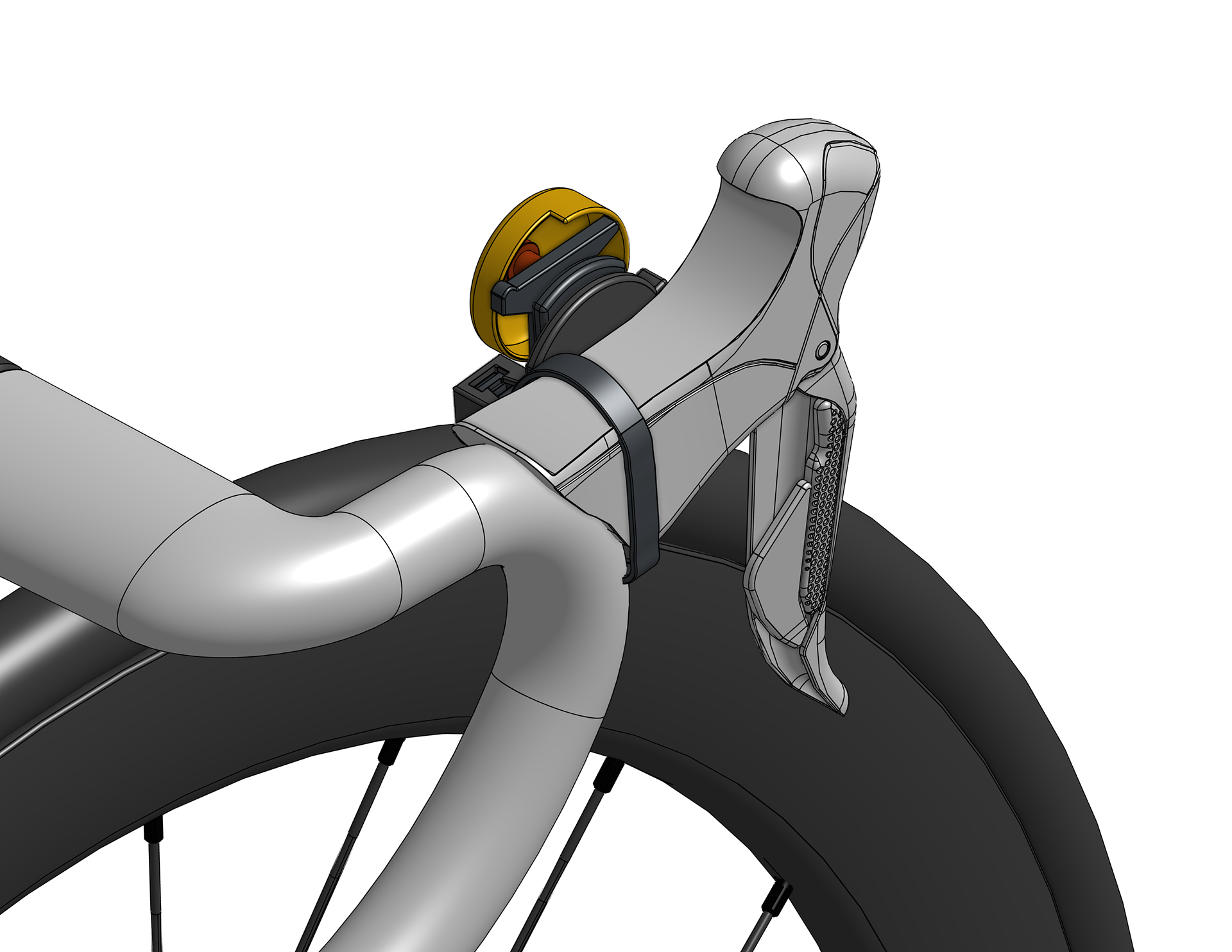
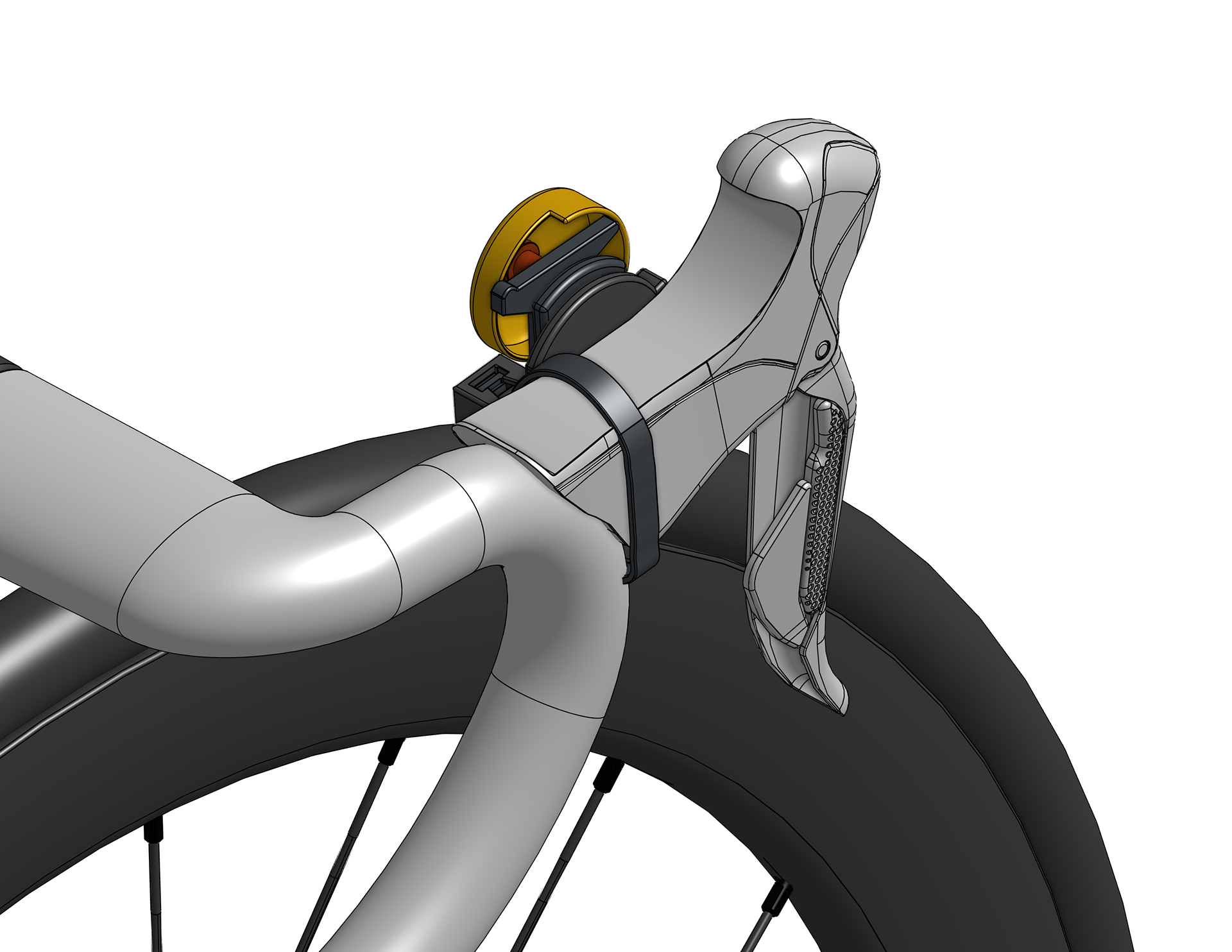
The handlebars of drop-bar (road) bicycles have uniquely restrictive geometries. The operation, mounting schemes, and ergonomics of existing bike bells are incompatible with this type of bike handle bar.
Due to these factors, existing bike bells do not provide the necessary mounting compatibility and ergonomics required for safe operation on drop-bar bicycles.
Design Objective
Design an improved bike bell for drop-bar bicycles that be rationally mounted to a range of road bike handlebar geometries. The bell must be ergonomically positioned and operated, such that the operator need not remove their hands from the handlebars to actuate it (a common cause of accidents among surveyed road bicyclists).
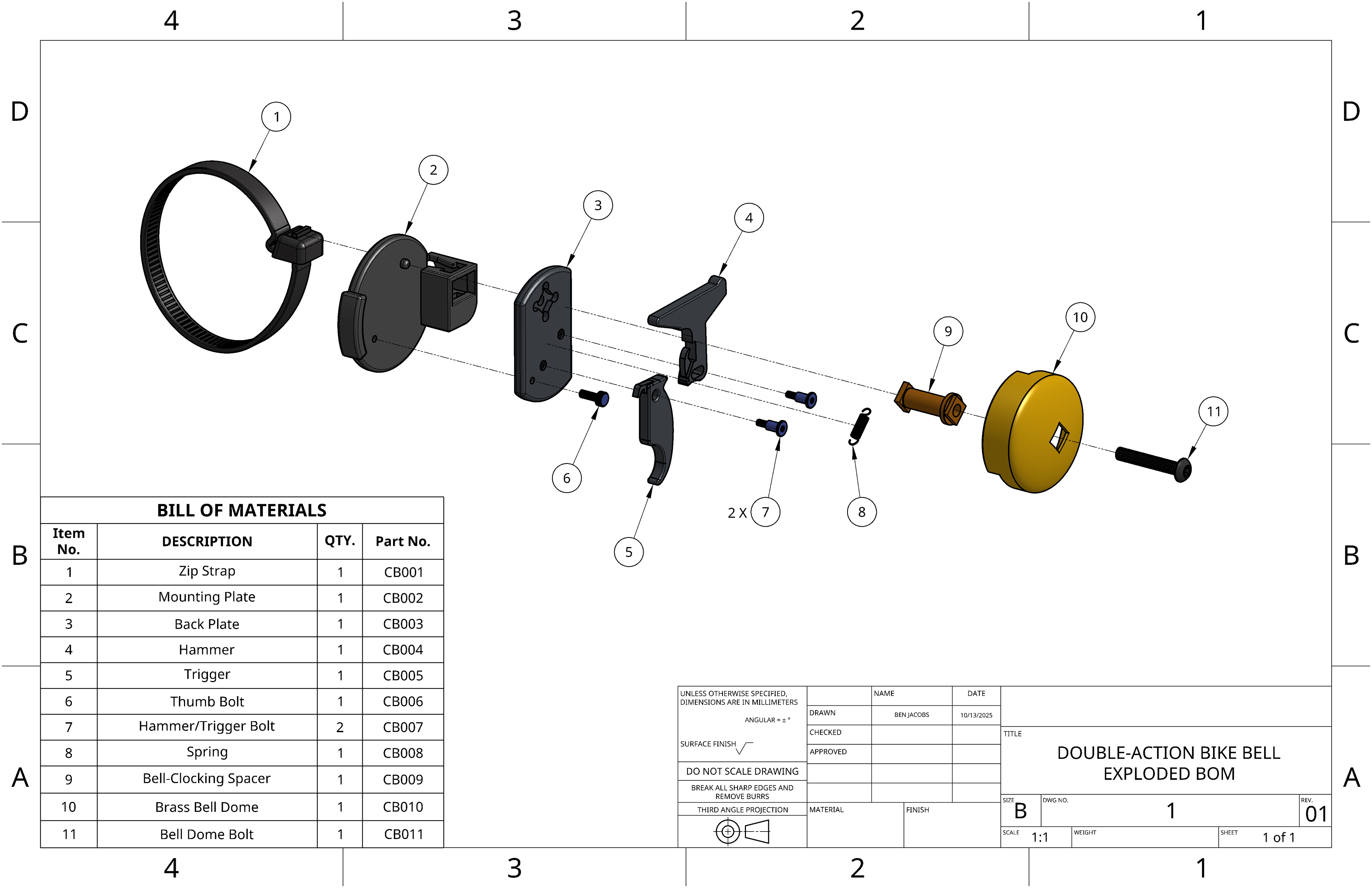
Design Solution: Double-Action Bike Bell
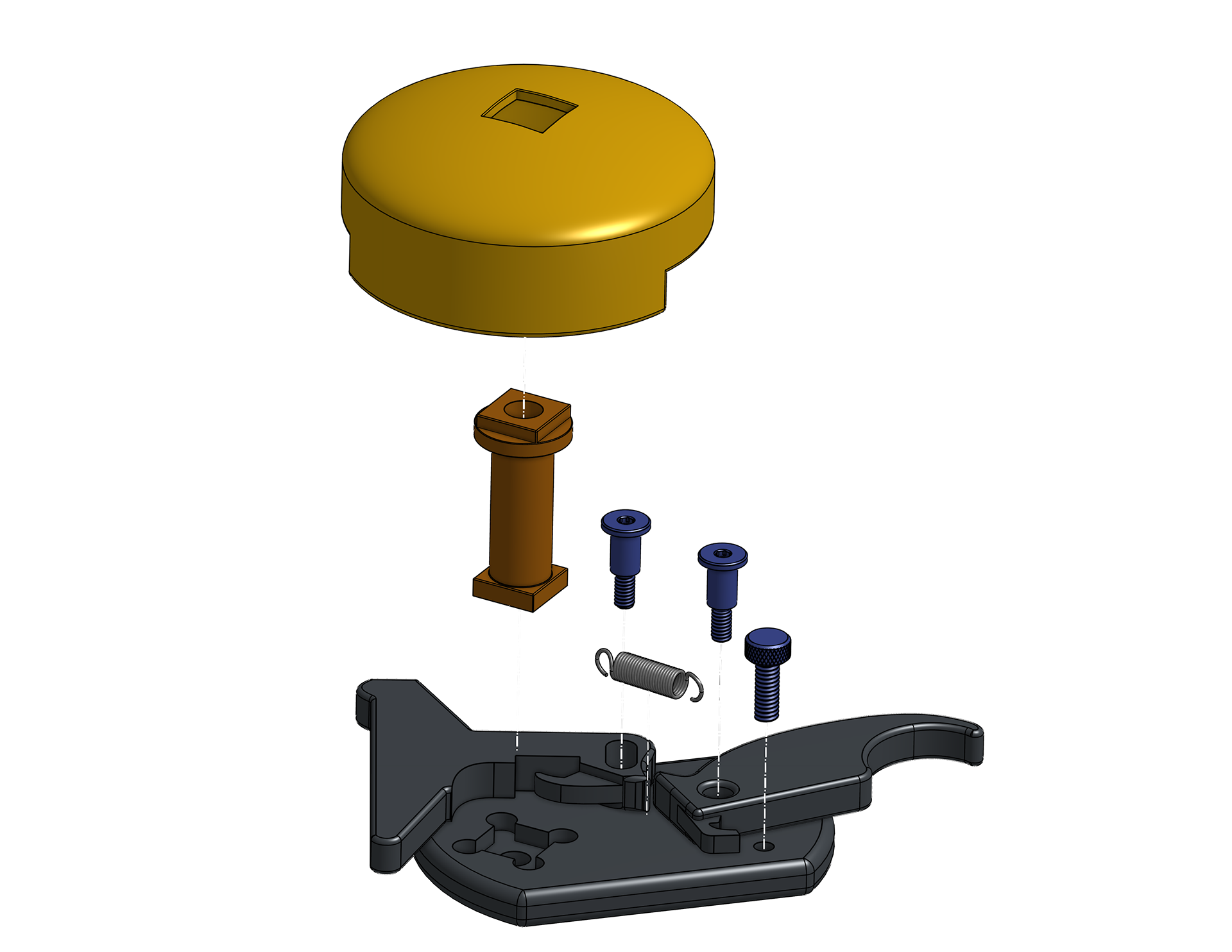
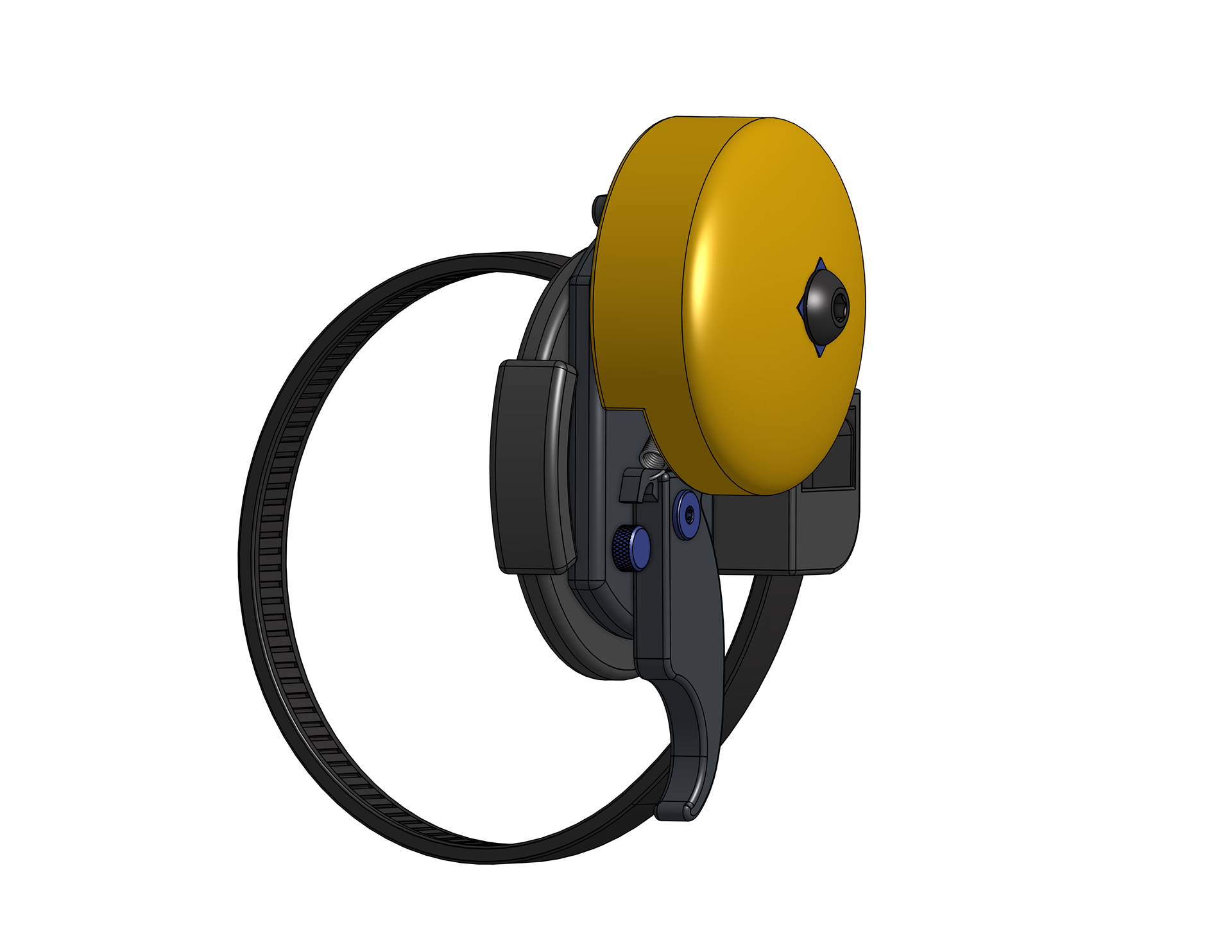
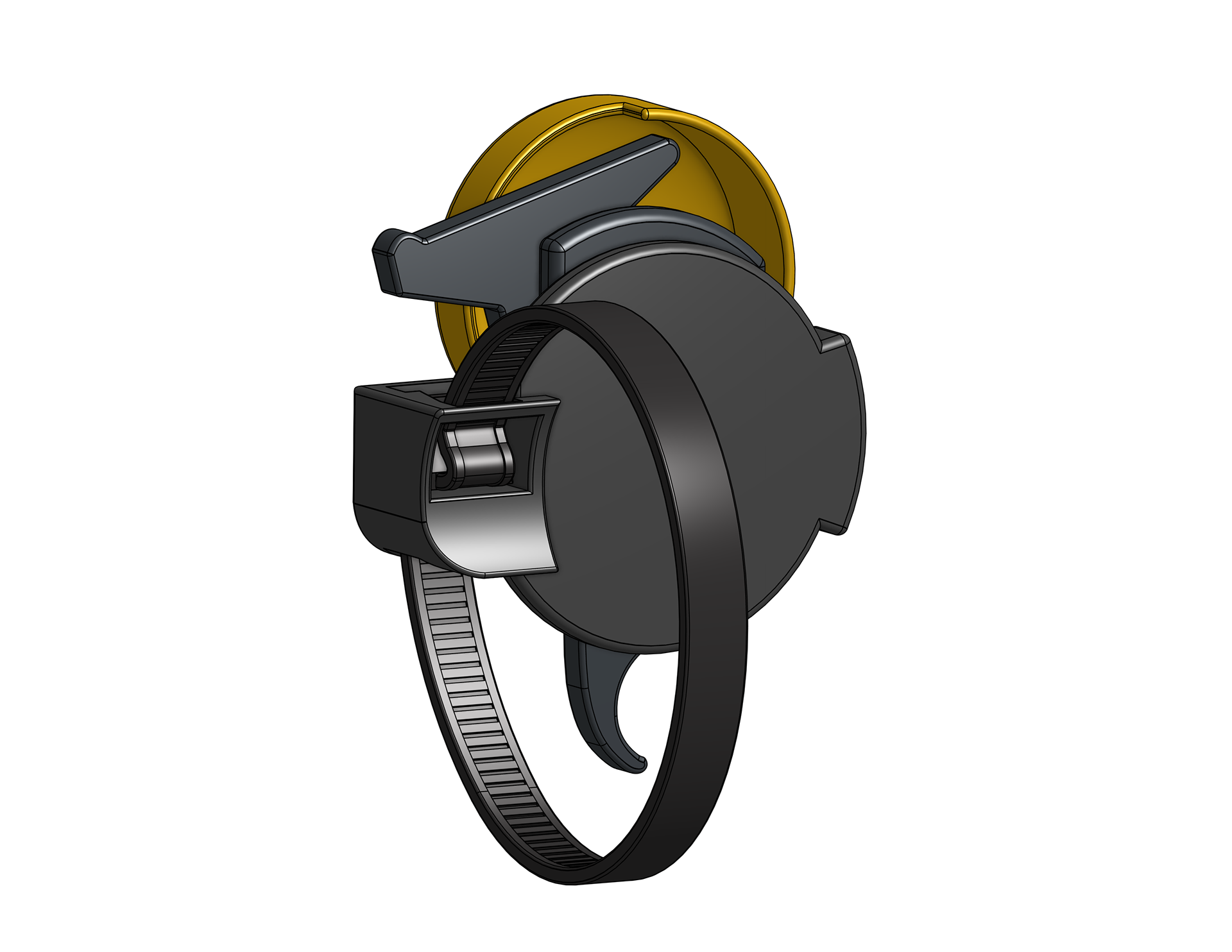
Internal Striker
This is the first bike bell with an internal striker. All current bike bells impact the exterior of the bell dome. This provides a smaller design footprint and provides a geometric foundation for the design's ergonomic superiority, detailed below.
Double-Action Mechanism
The double-action trigger mechanism allows for the user to actuate the bell from a range of hand positions commonly used with drop-bar handlebars. In practice, the bell can be activated via the hammer on top (with the thumb), or the trigger from below (index or middle finger).
These two physical control interfaces greatly expand the user's ability to approach and then actuate the bell in 3-D space.