Individual Contributions
• I was responsible for the complete design and fabrication of the electromechanical assembly. This included determining the overall cable-actuation architecture, design of all custom mechanical components (backbone, vertebrae, accelerometer mount, enclosure), sensor and servo selection, and electronic wiring & assembly
• I collaborated with group members in C++ to achieve reliable positioning of the endoscope's distal end via joystick, in addition to outputting positional data via the accelerometer & gyroscope
Background
This project was completed for a medical robotics course. It involved the design and fabrication of a tendon-driven continuum robot. It features a soft backbone, 3-D printed in TPU, and a series of vertebrae. The primary objective was to assess the utility of this unique design methodology within the context of minimally-invasive robotic surgical applications. I was responsible for the design and implementation of the electromechanical system.
Design
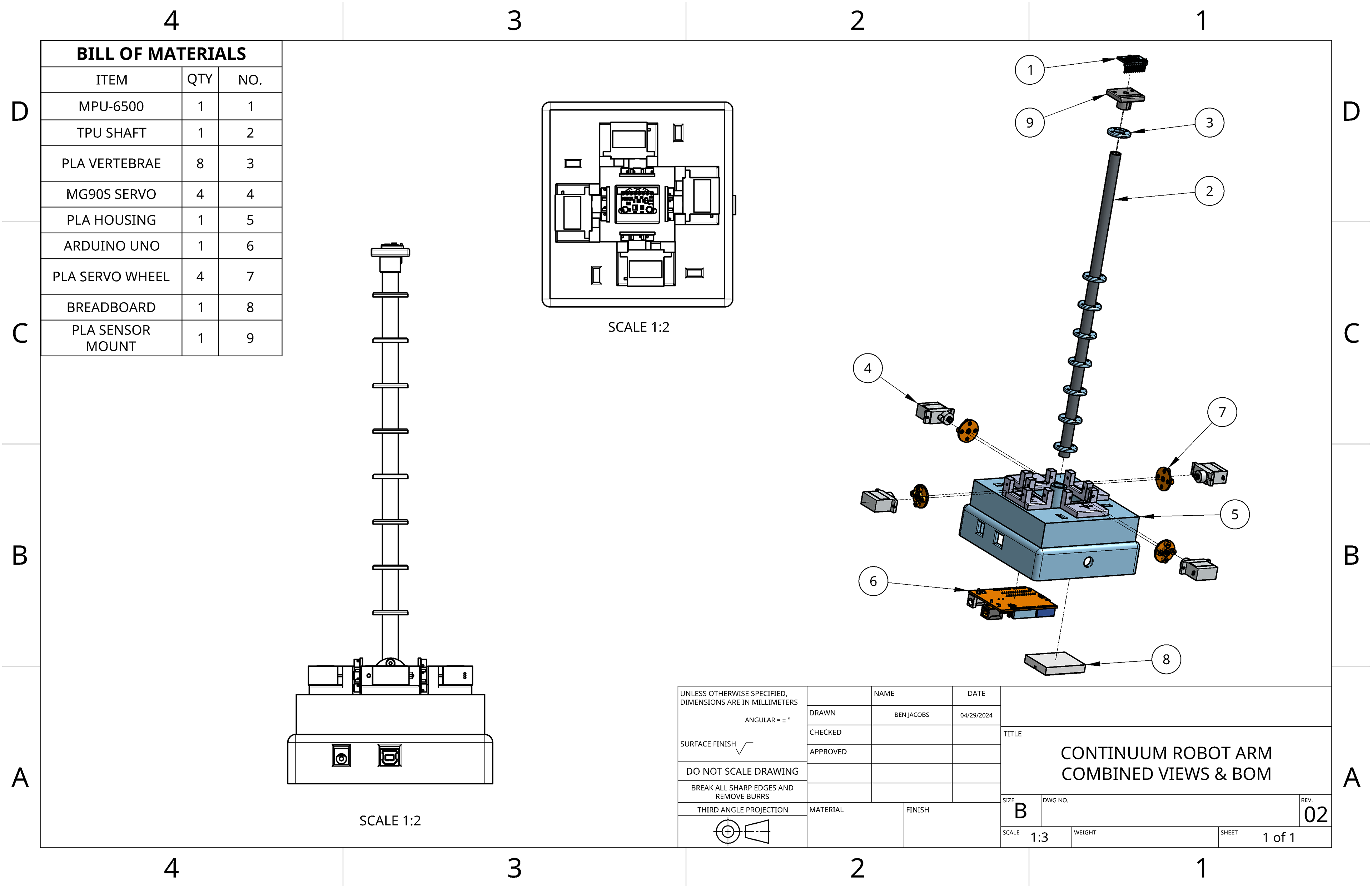
Exploded drawing view of assembly, featuring PLA enclosure and vertebrae, TPU shaft, 4 MG90s servos, Arduino board, and MPU-9250 6-axis gyroscope for sensing and positioning of end-effector.
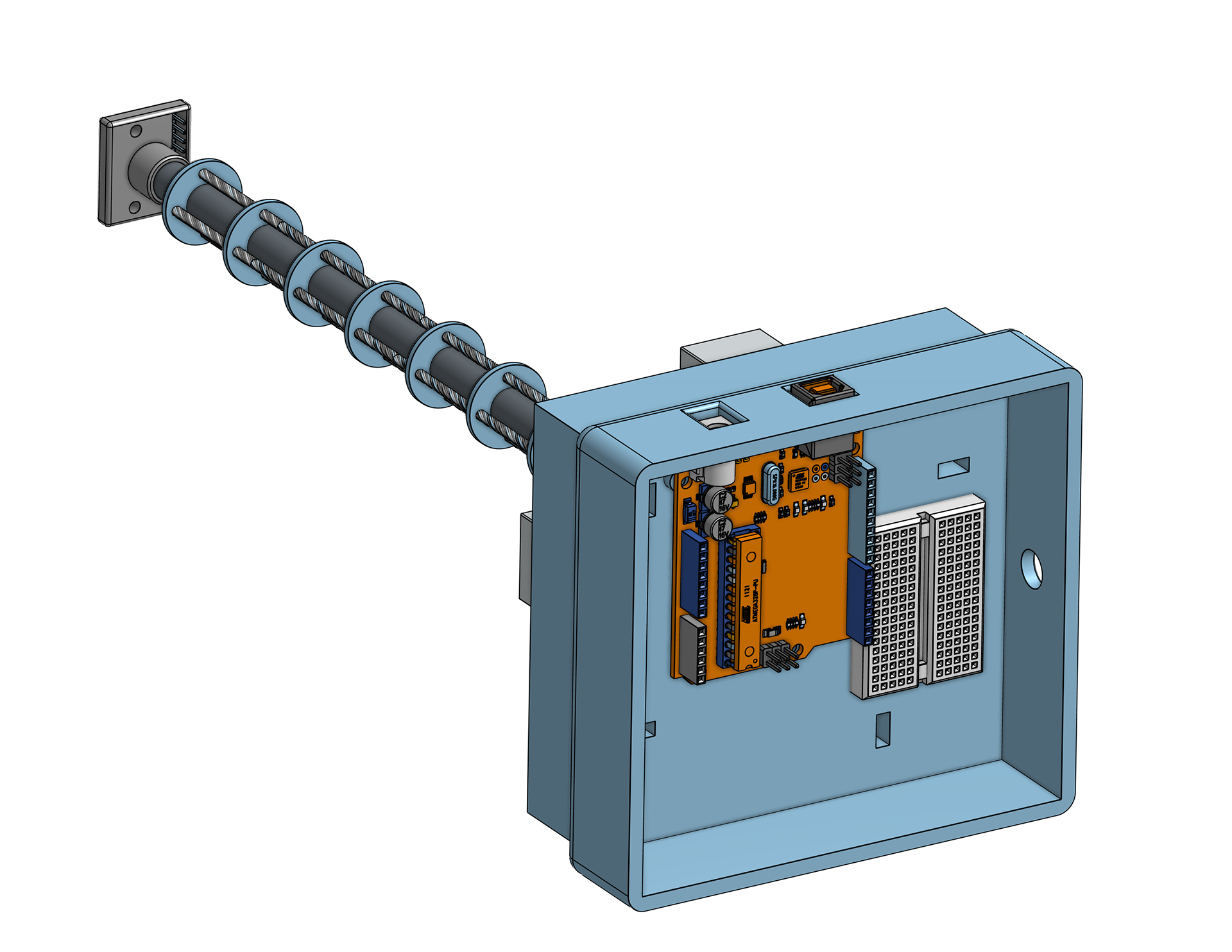
CAD rendering showing mounting of control board, cable routing channels, and power/data ports.
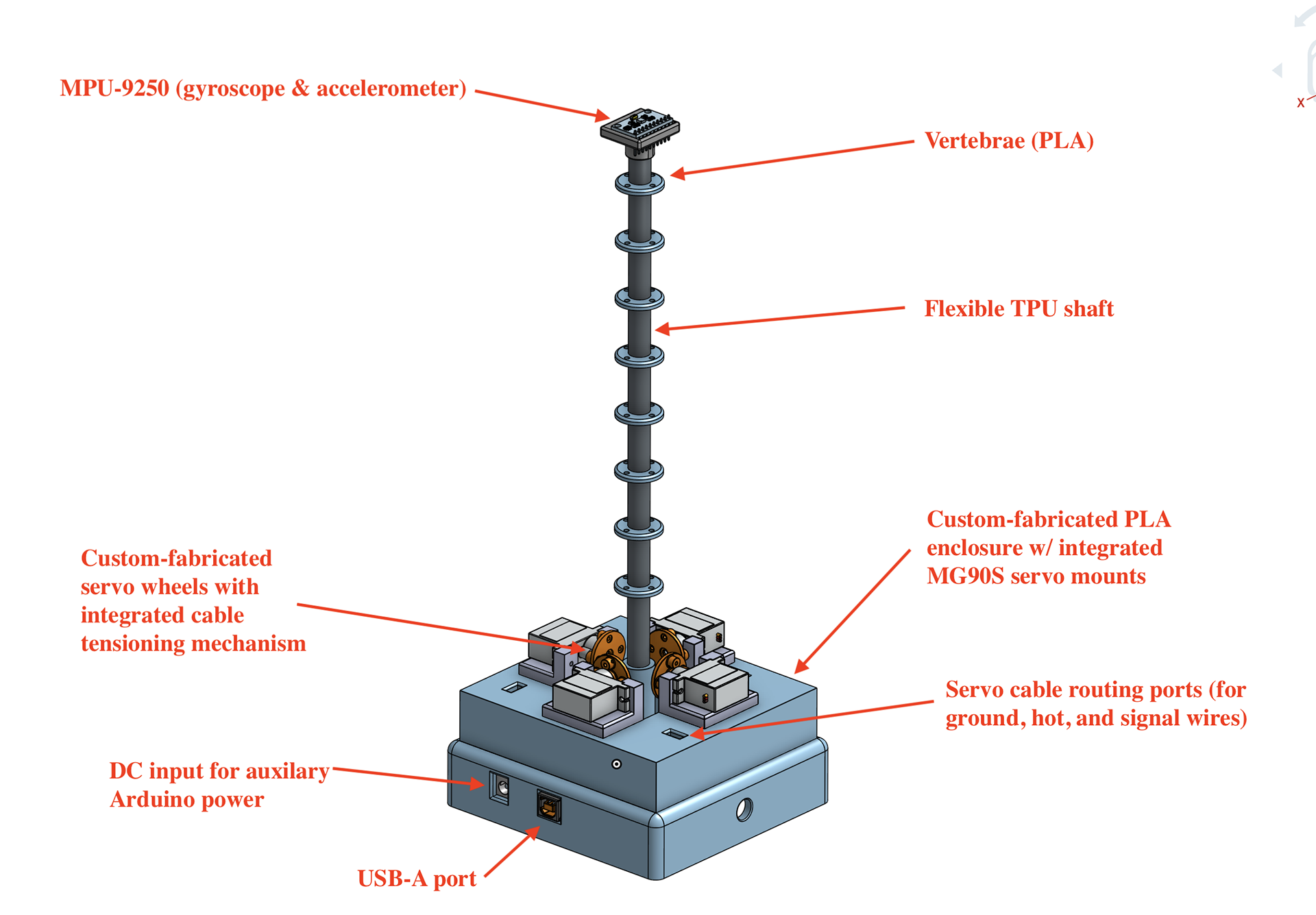
Labeled diagram with callouts to main components and features. The materials for all 3D-printed components are also specified.
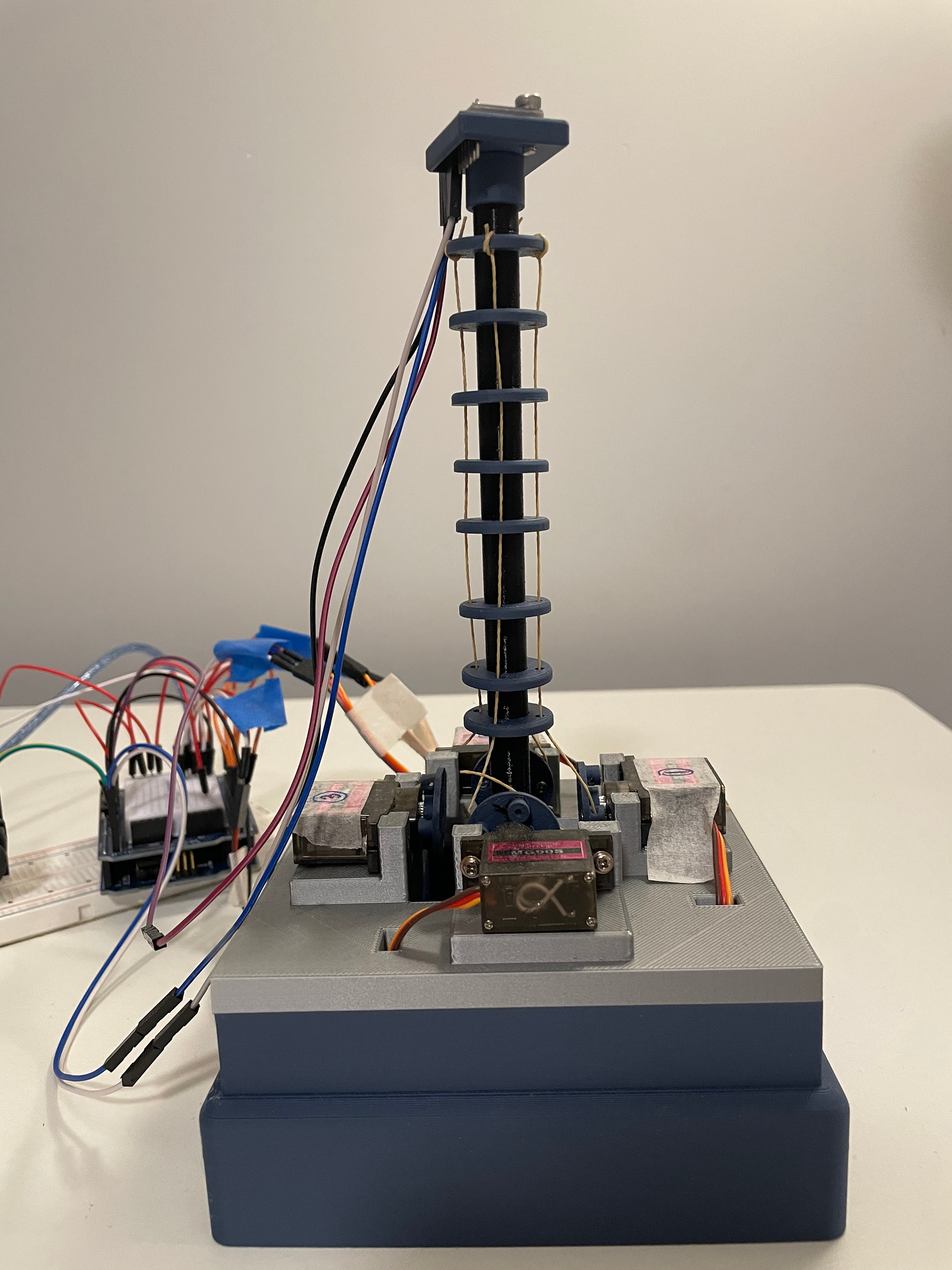
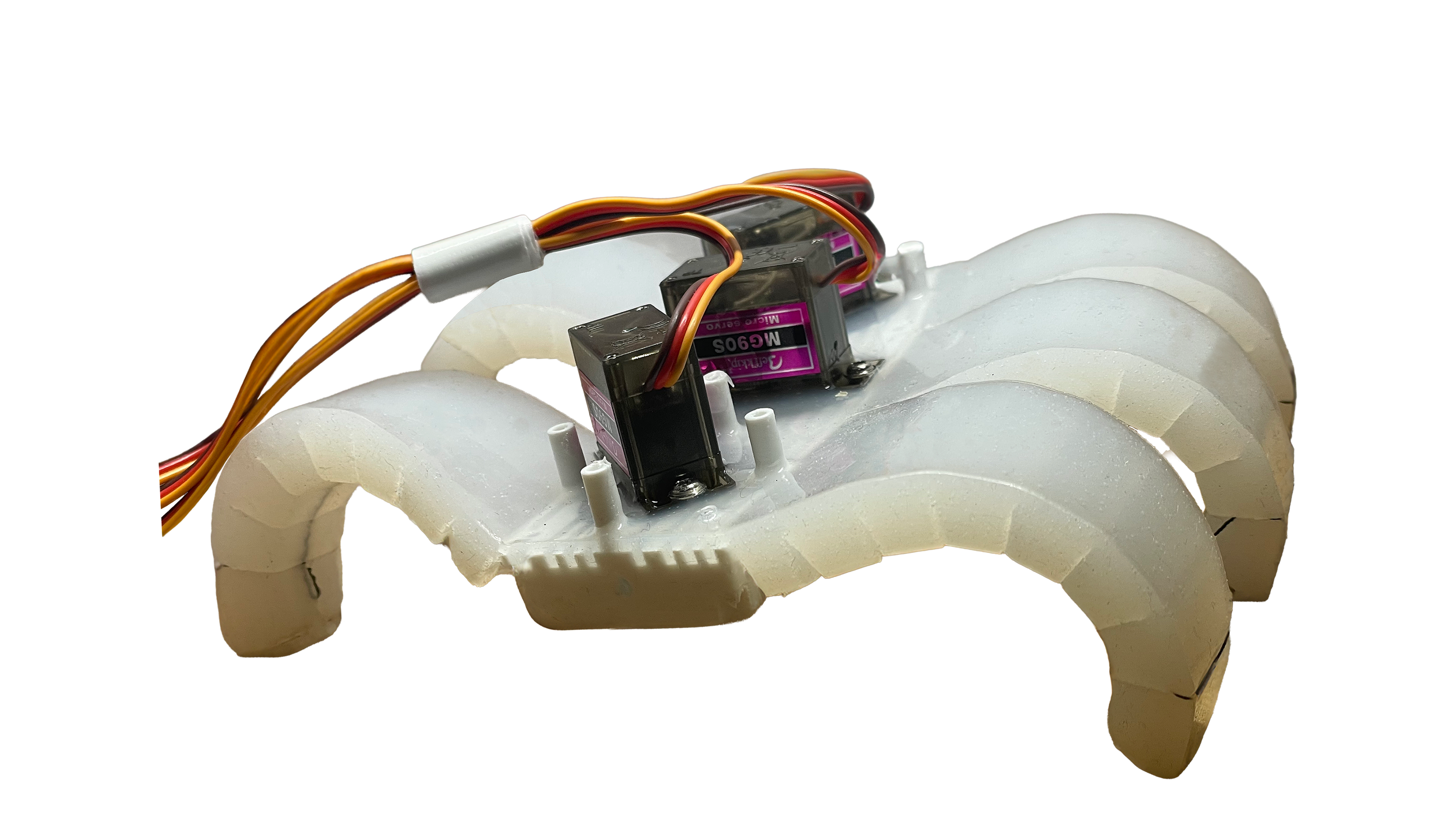
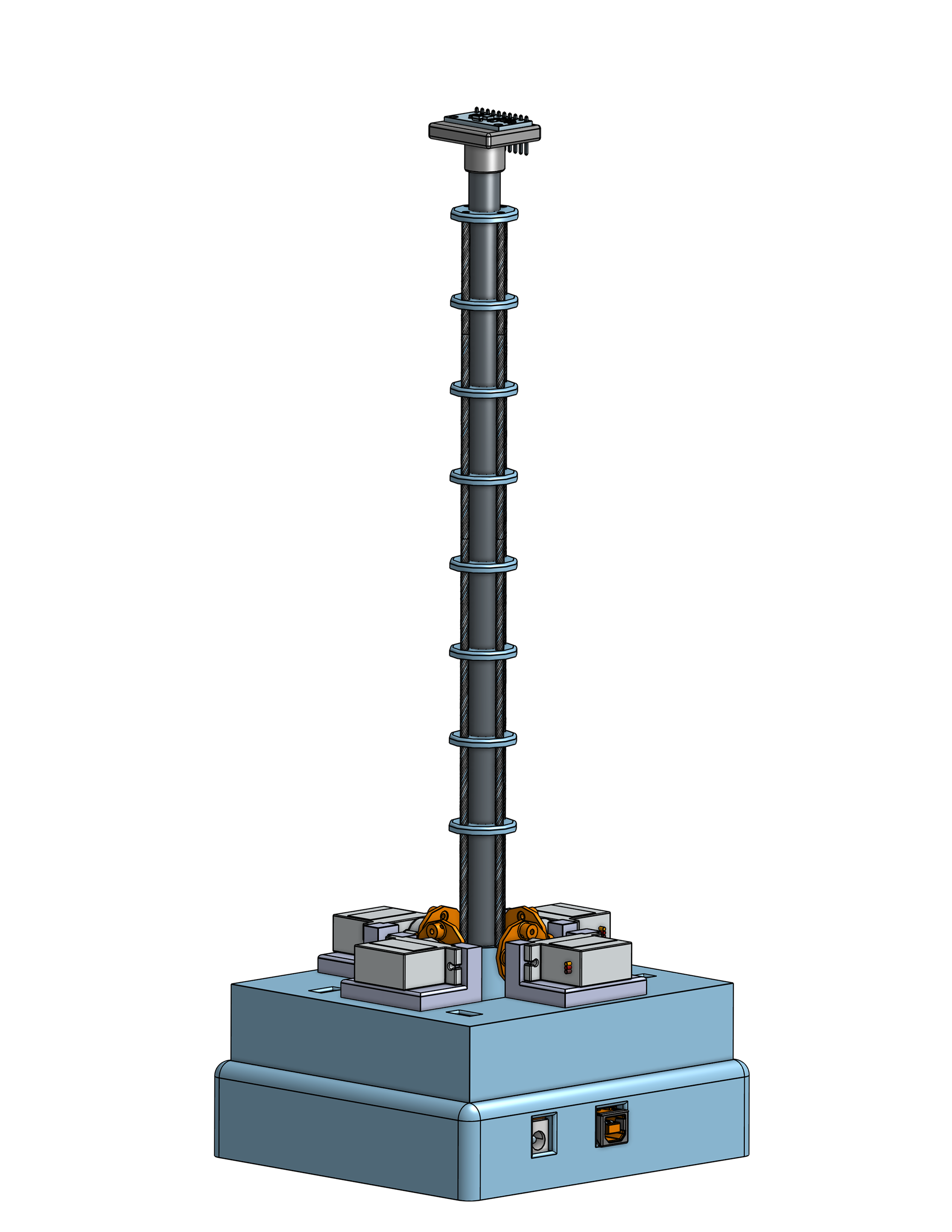
Functional device prototype.
Fabrication
Time-lapse video of 3D printing PLA components.
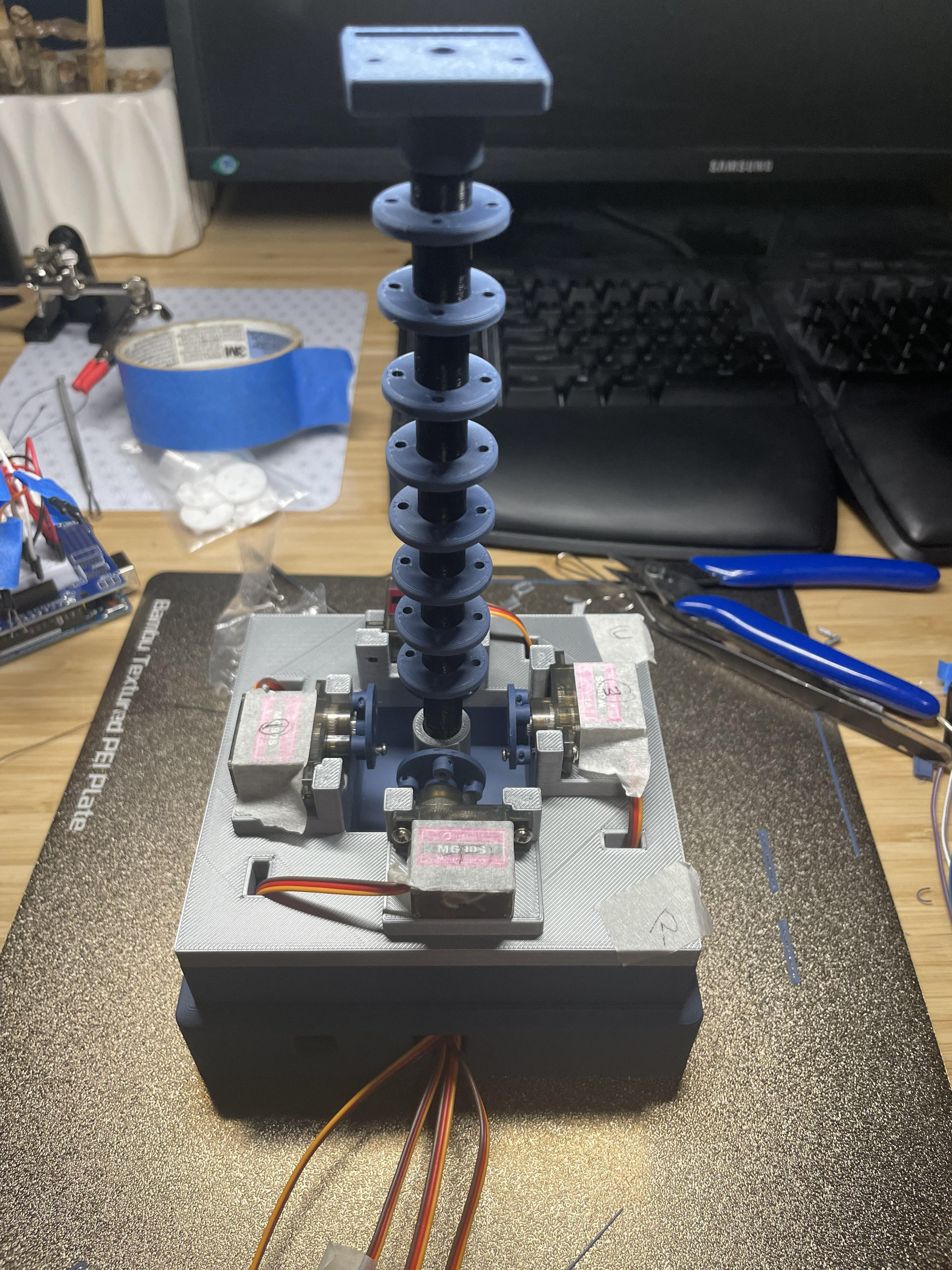
Initial assembly of electromechanical system on bench.
This project underscores the utility of FDM 3-D printing for rapid prototyping, testing, and design iteration. It also highlights how flexible filaments (in this case TPU) can be used to fabricate compliant components, in combination with rigid materials such as PLA and PETG.
Operation
Video of completed platform in operation, showing active positional feedback on the serial monitor from the MPU-9250 gyroscope, and joystick control system.
Conclusion
The completed robot fulfilled all initial design objectives, and was able to reliably position the distal end of the backbone (end-effector) with both precision and accuracy. This proof-of-concept highlights the utility of soft-backbone robots within the realm of medical robotic surgical procedures.
Analysis
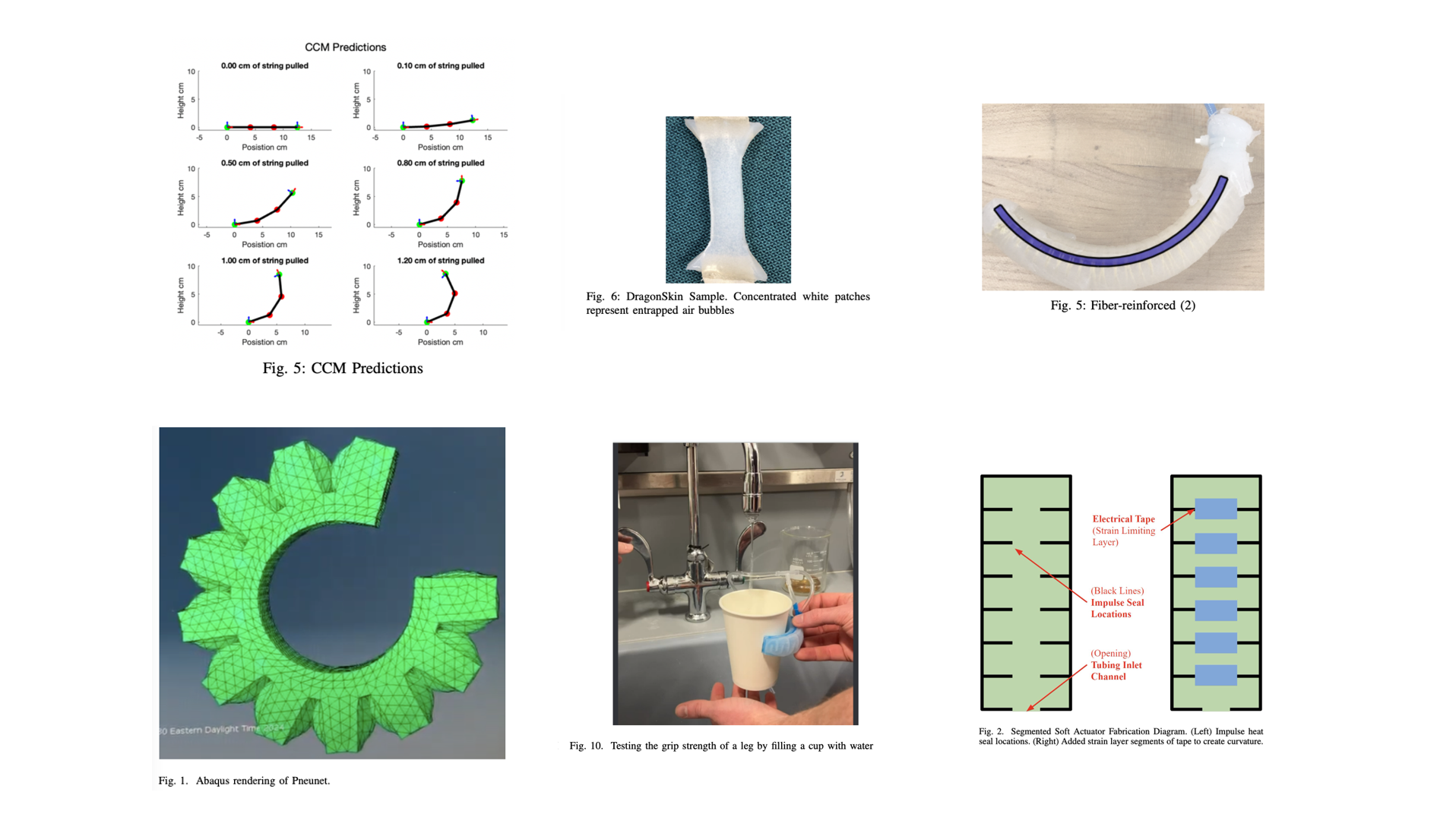
Due to the theoretically infinite degrees of freedom afforded by this continuum robot, it's behavior is best modeled via constant curvature modeling (CCM). Preliminary tests show that a CCM-driven framework would reliably capture the observed kinematic behavior of the system.
The final research paper for this project can be accessed below. This report includes a thorough review of the existing state of the art for minimally-invasive surgical robots, and presents the results of NASA task-load testing performed with the robot, to quantify the reduced mental exertion on human operators, relative to manual operation of conventional endoscopes.