Overview
Background
Soft robots are defined by their use of highly-compliant materials, this makes them well-suited to navigating complex environments and performing delicate tasks, for which rigid robots are unsuited. In use cases where a platform must interact directly with human beings (e.g. assistive devices, medical robots), soft robots are particularly valuable.
Soft robots are comprised of materials with low shore hardness (in the range of 10A to 70A). This material property requires careful engineering choices to achieve the force transfers required for locomotion.
These challenges must be addressed in order to fully leverage the advantages of soft robotic platforms.
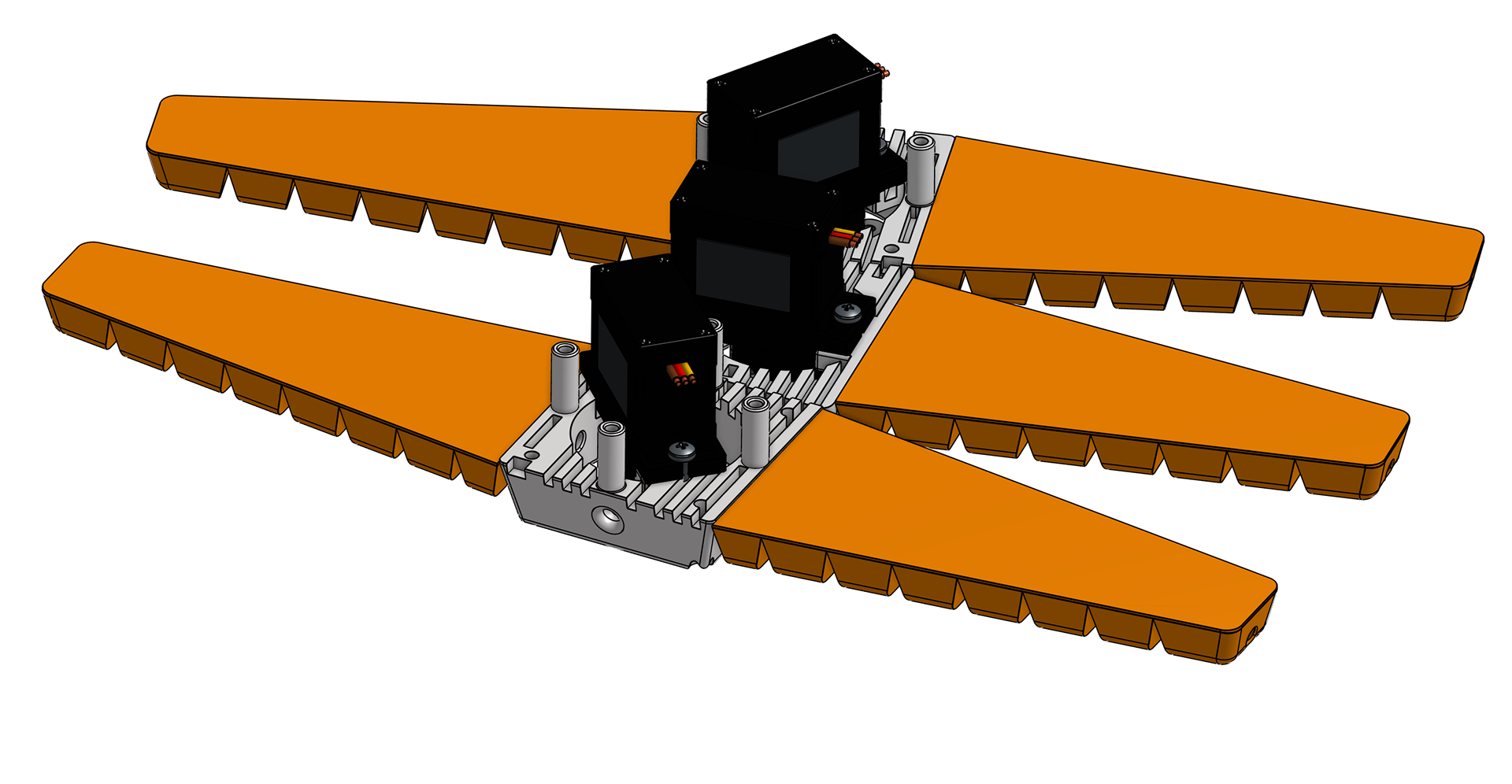
CAD rendering of Starfish soft robot
Design
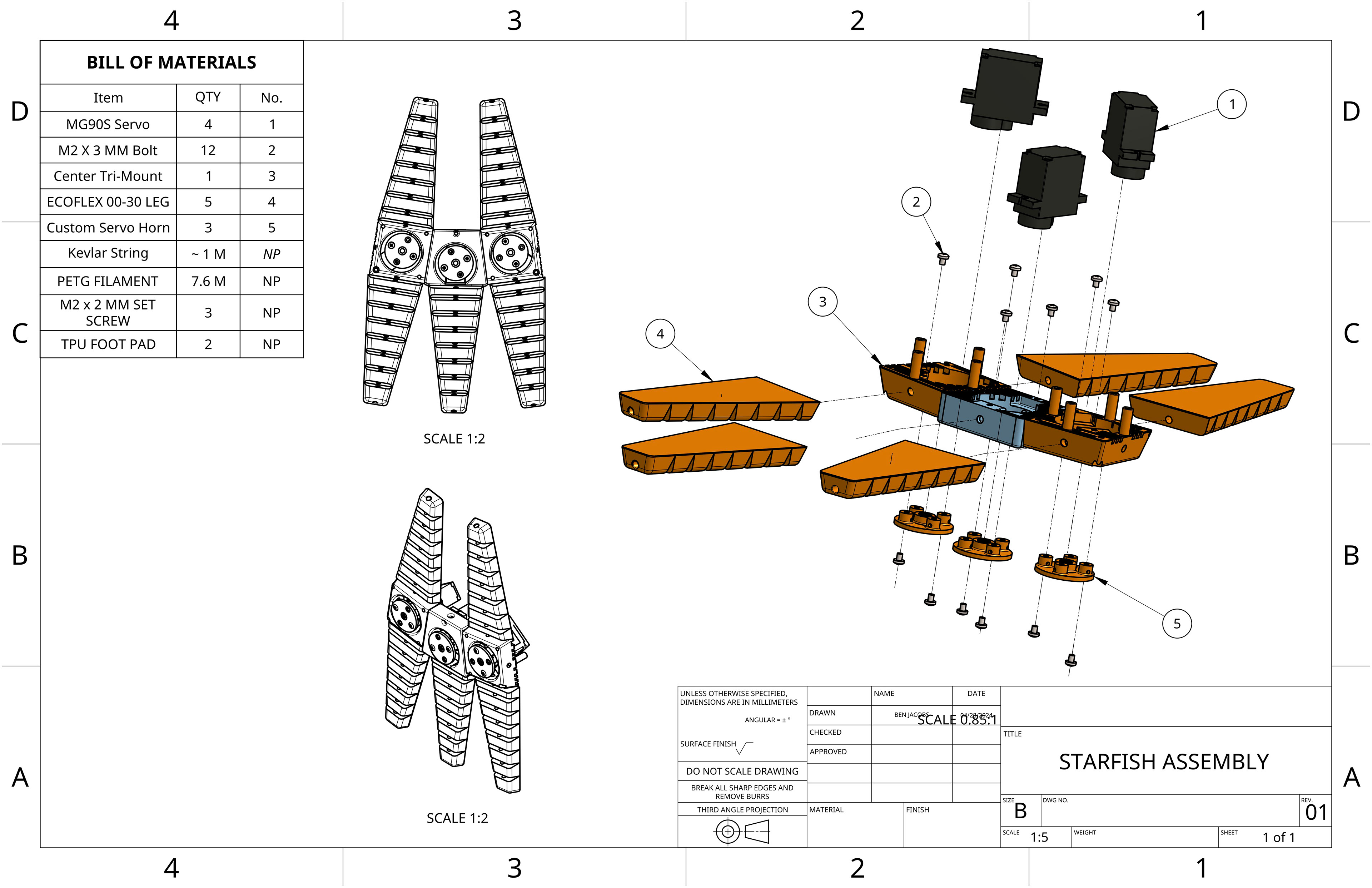
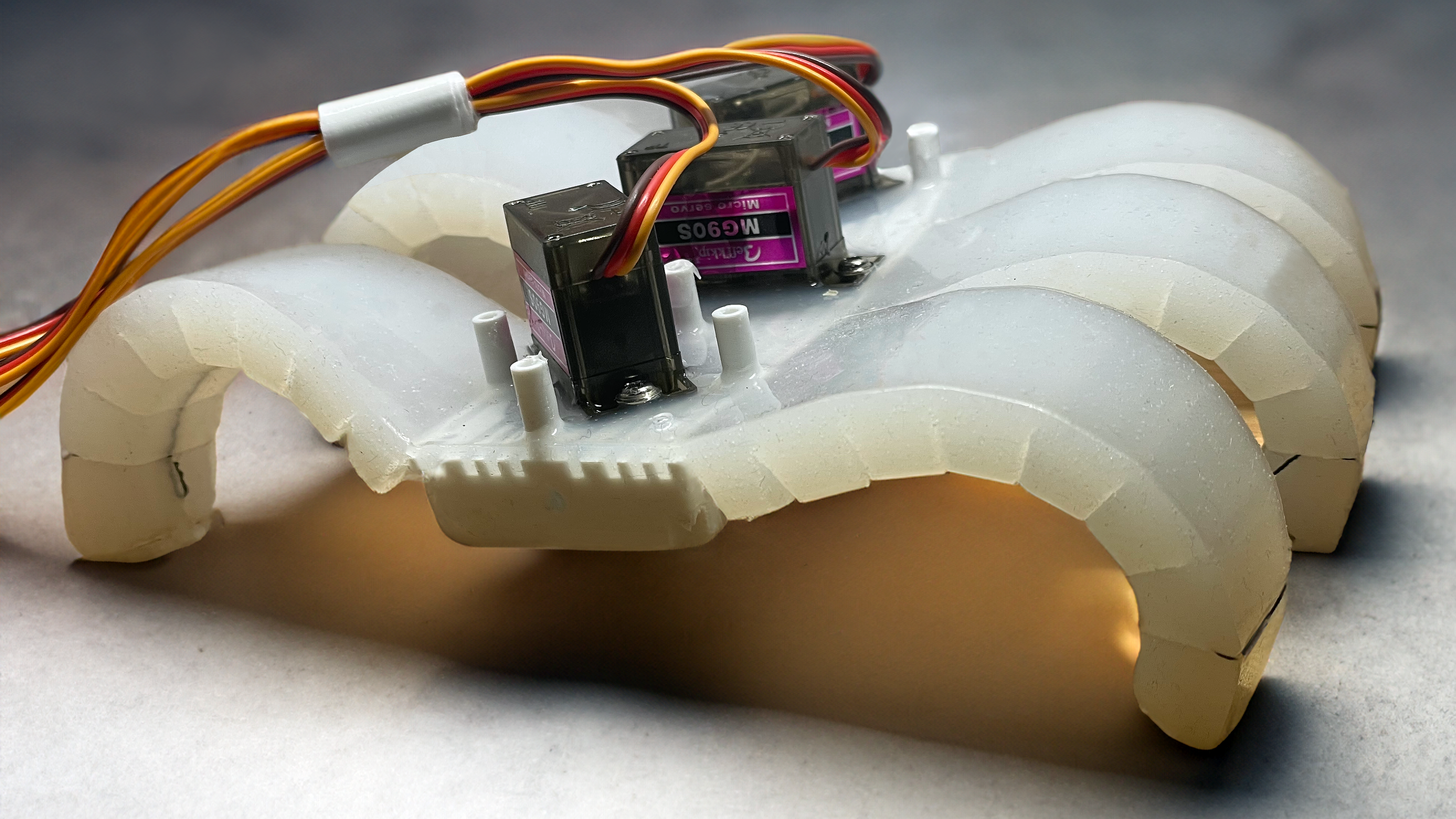
Exploded drawing view of final Starfish design. Featuring 3 MG90s metal-geared servos, with silicone (Ecoflex 00-30) limbs, and PETG torso.
Objective
The goal of this project was to design a soft robotic platform, capable of directional locomotion. This design was produced with the ultimate aim of competing in an inter-institutional soft robotics competition, where it earned the fastest straight-line speed trial over a fixed distance.
While many soft robots utilize pneumatics or dielectric shape memory alloys (SMA) for actuation, I was interested in leveraging cable actuation in this design.
Fabrication
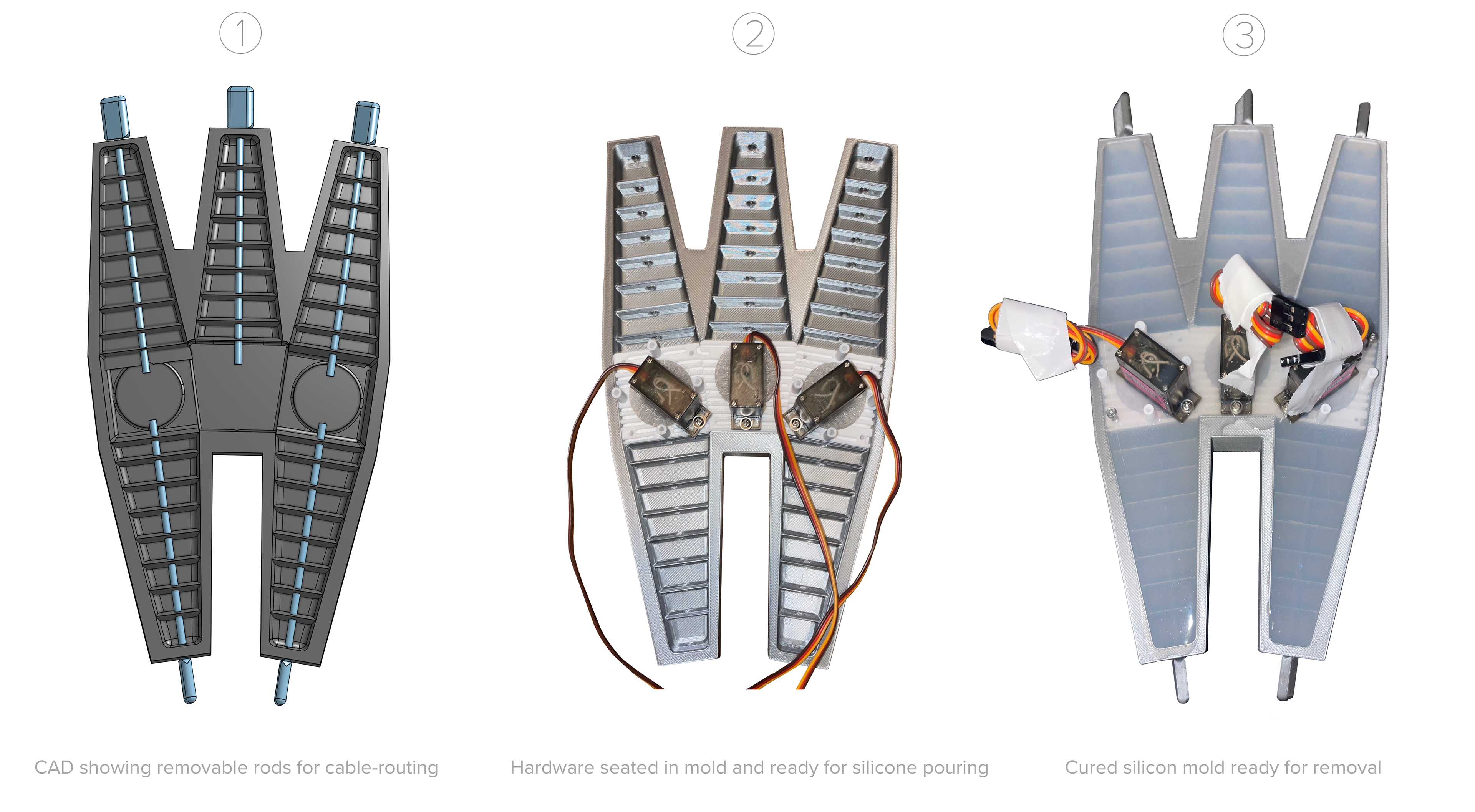
Silicone Casting
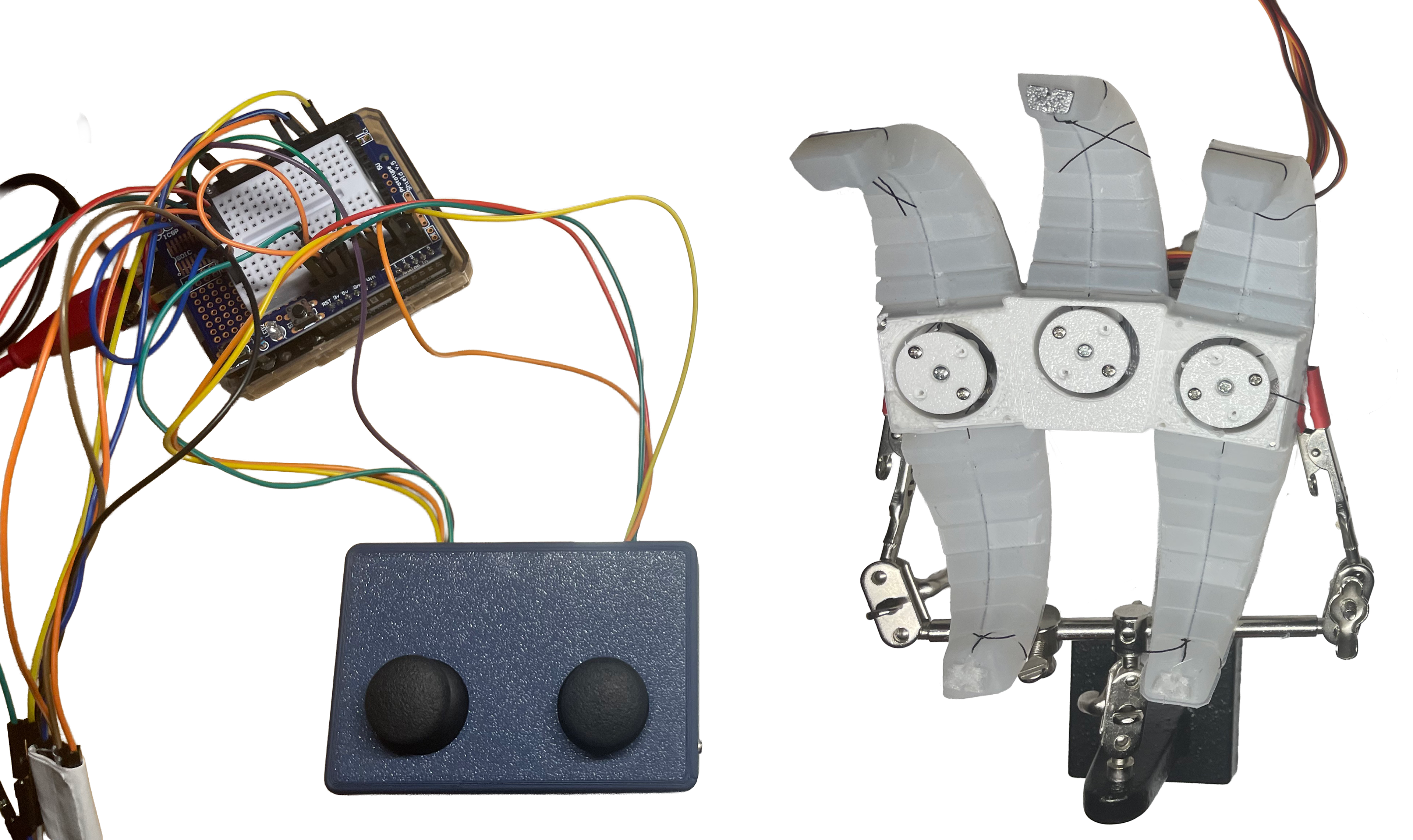
Bench Testing & Controls
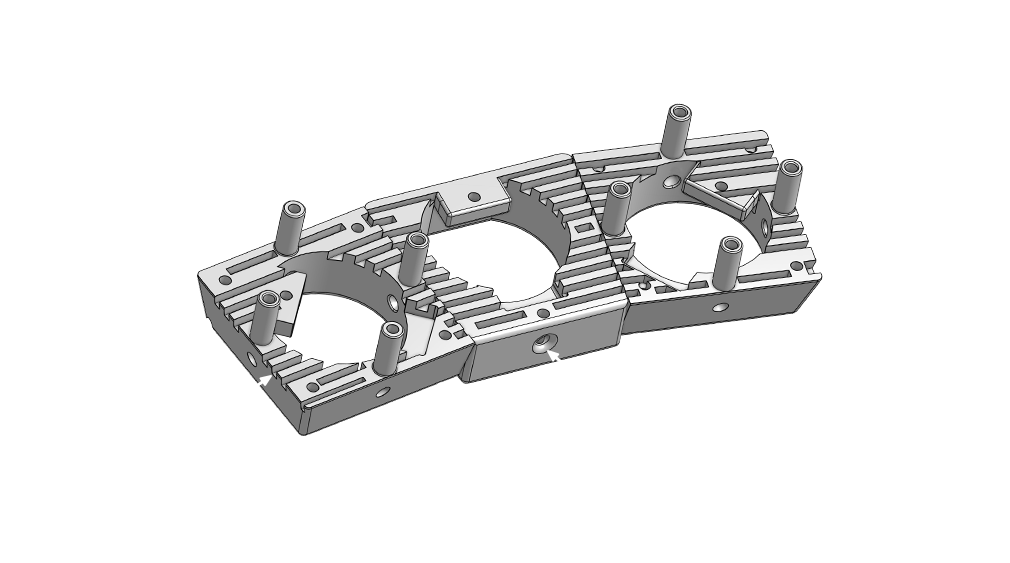
Tri-Hub Skeleton
Live Demo Video
Demo video of final operational robot featuring initial bench tests to validate both electromechanical control and forward, left, and right maneuvering capabilities.
Conclusions
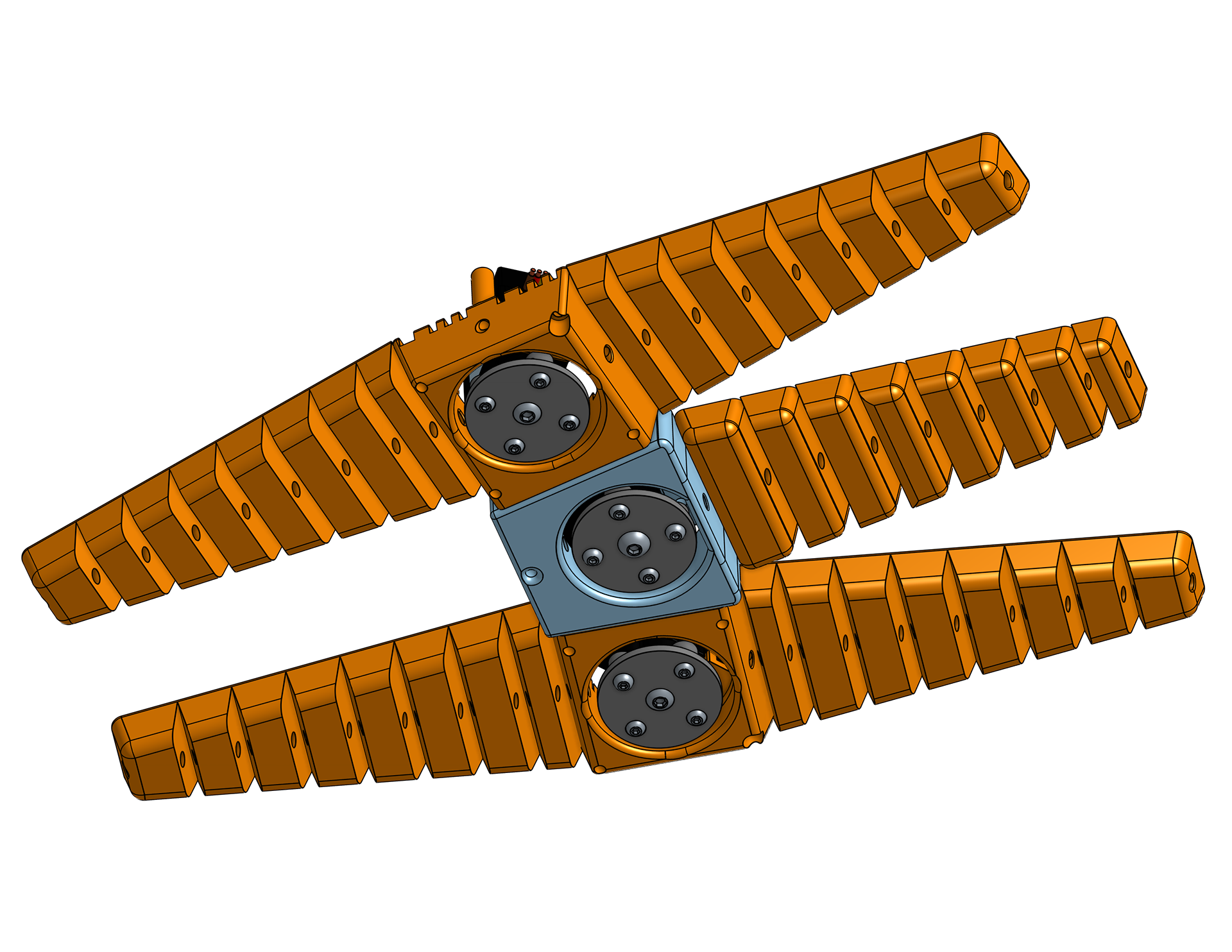
Full CAD rendering of final design (bottom perspective).
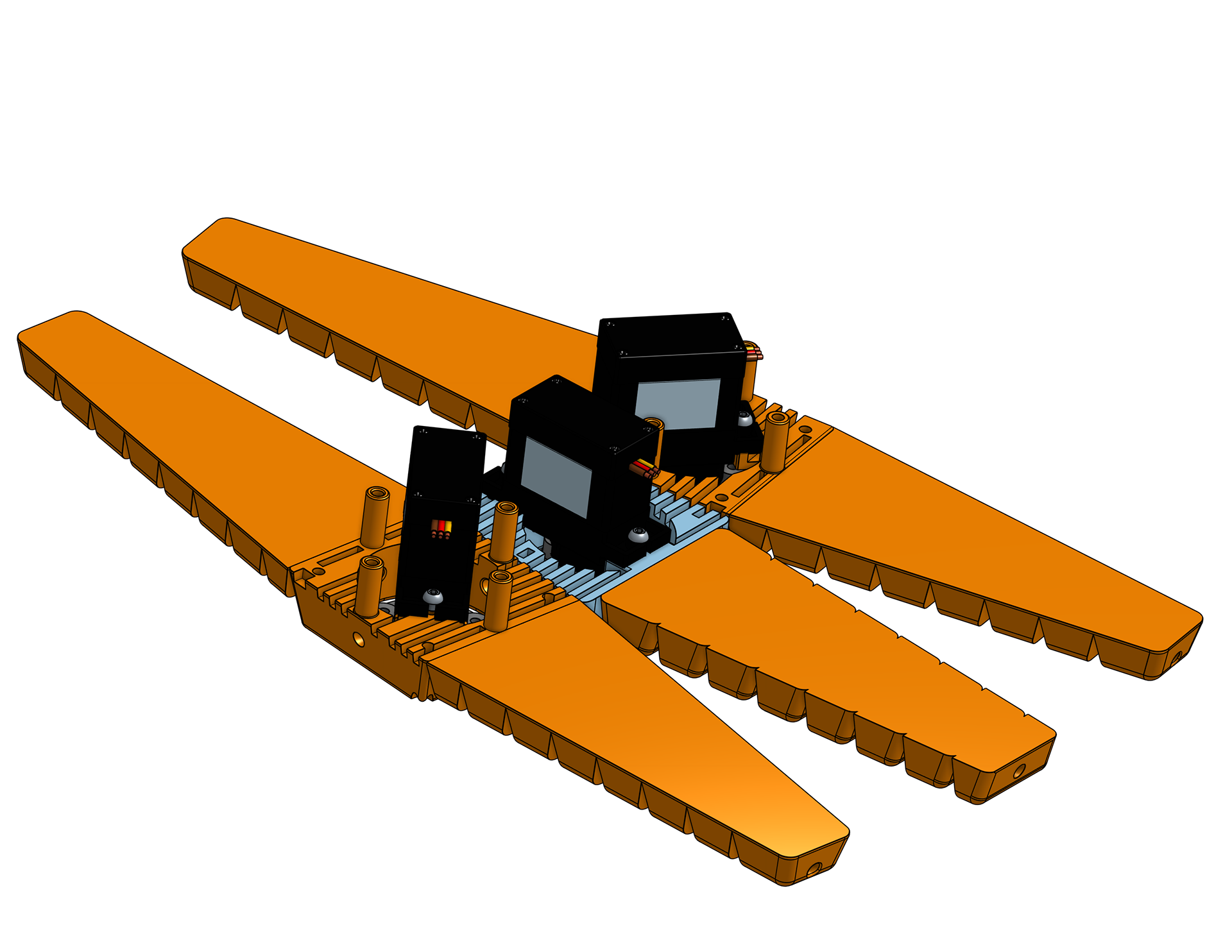
Full CAD rendering of final design (top perspective).
Applications for soft robots include medical robotics, biomedical engineering, and other use cases where robots come into close contact with human beings or other fragile objects, e.g. produce packing, harvesting fruits and vegetables, and so on. In these settings, soft robots can leverage their compliance to reduce risk to humans.
These same properties make soft robots promising candidates for navigating confined spaces, where traditional rigid robots would be unable to reach (such as in remote rescue operations and space exploration).