Objectives
The goal of this project was to gain a better understanding of the kinematics, hardware, and pick-and-place capabilities of a 6-DOF robot arm that I built. I designed and fabricated a vacuum gripper end effector, to compare its capabilities to conventional grippers.
Demo video of custom designed vacuum gripper end effector performing pick-and-place operations
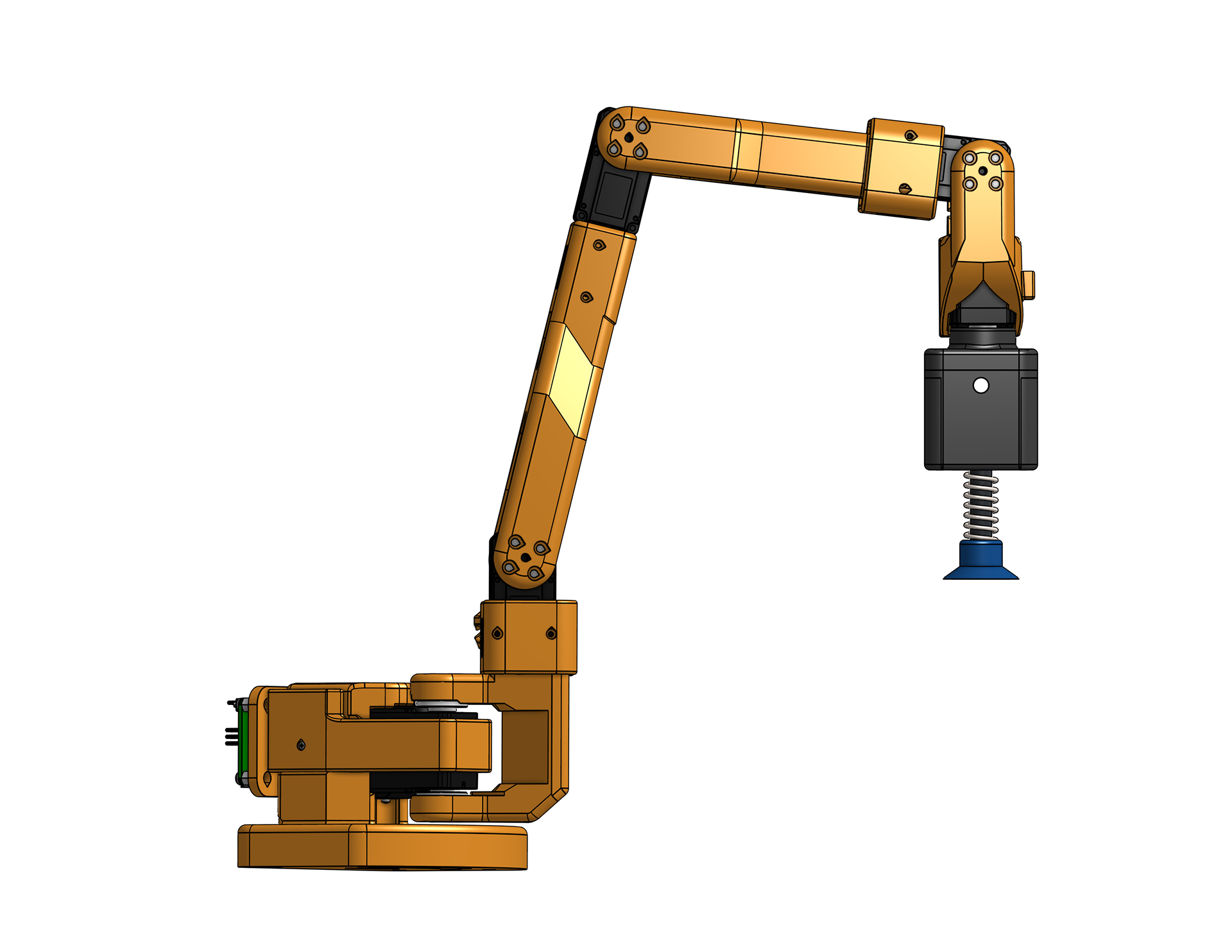
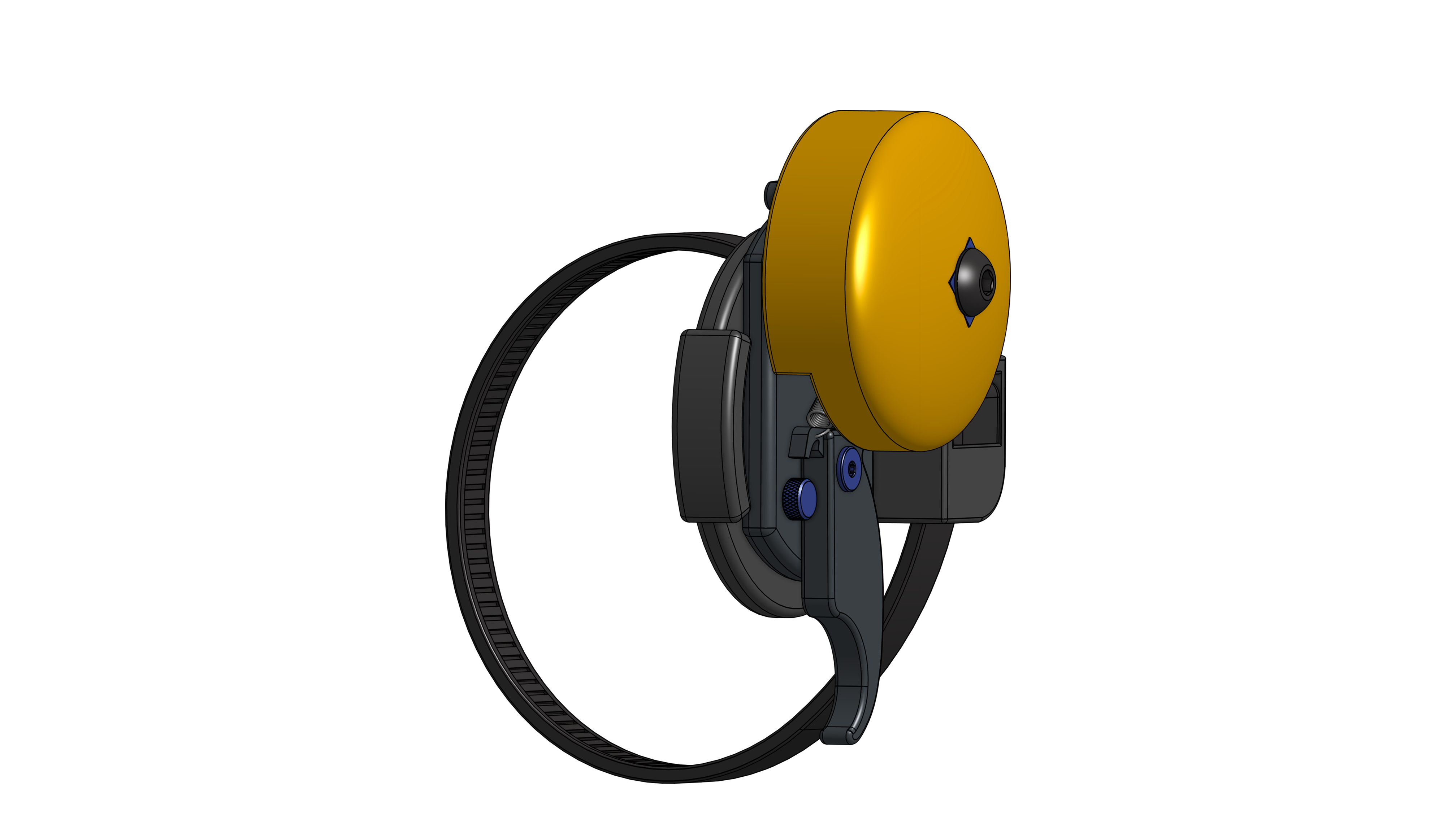
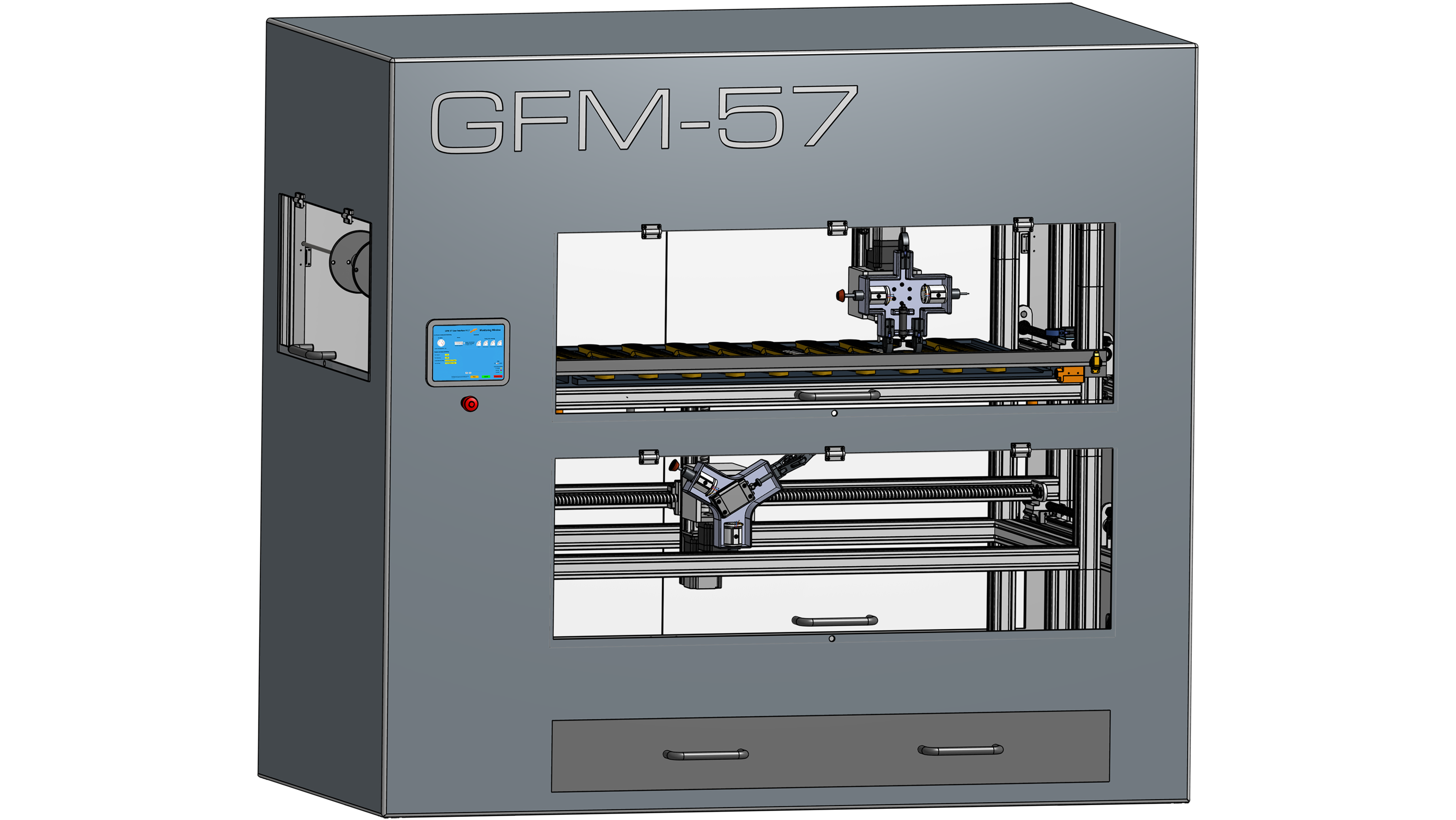
CAD of robot arm with modified vacuum end effector
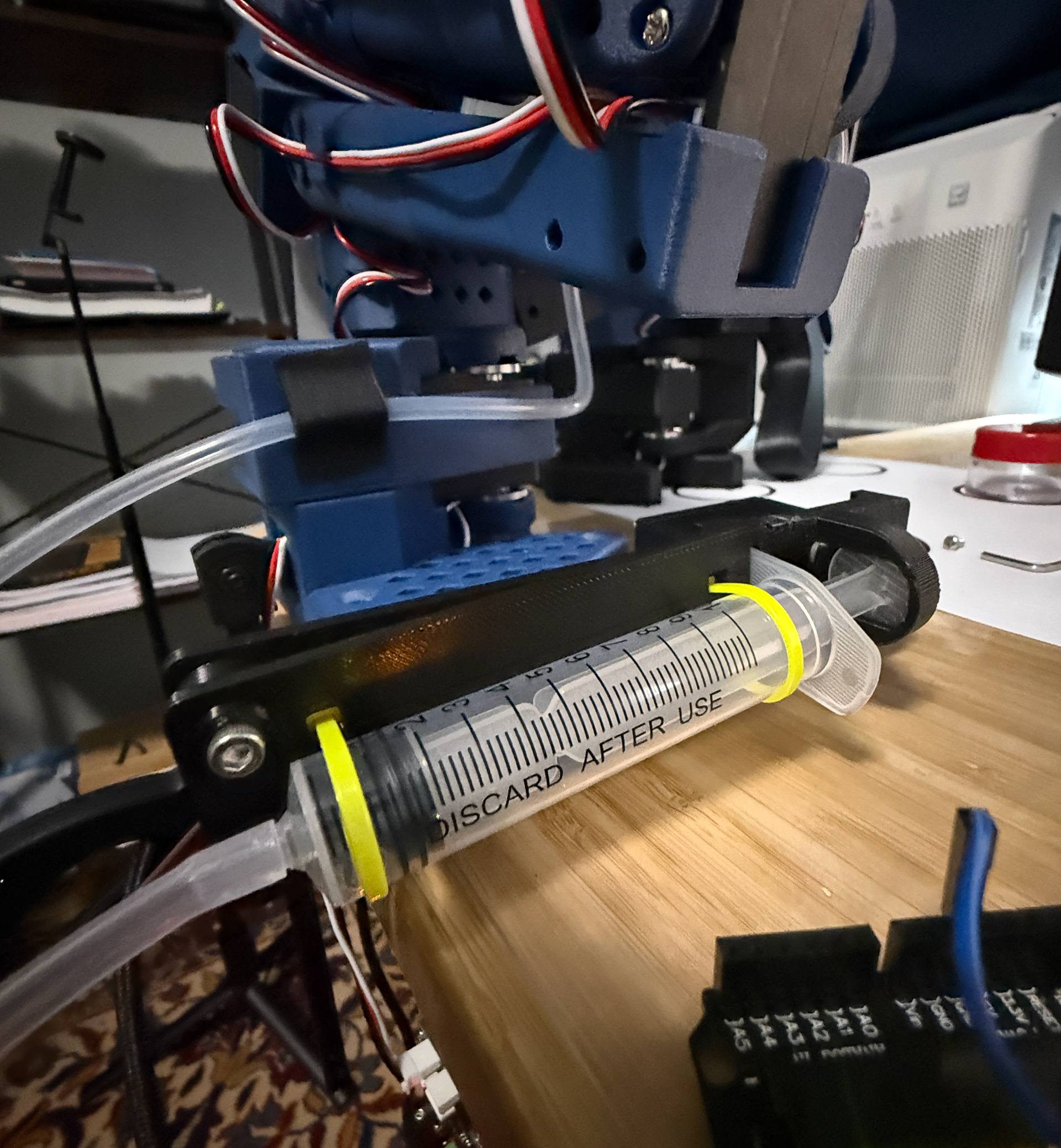
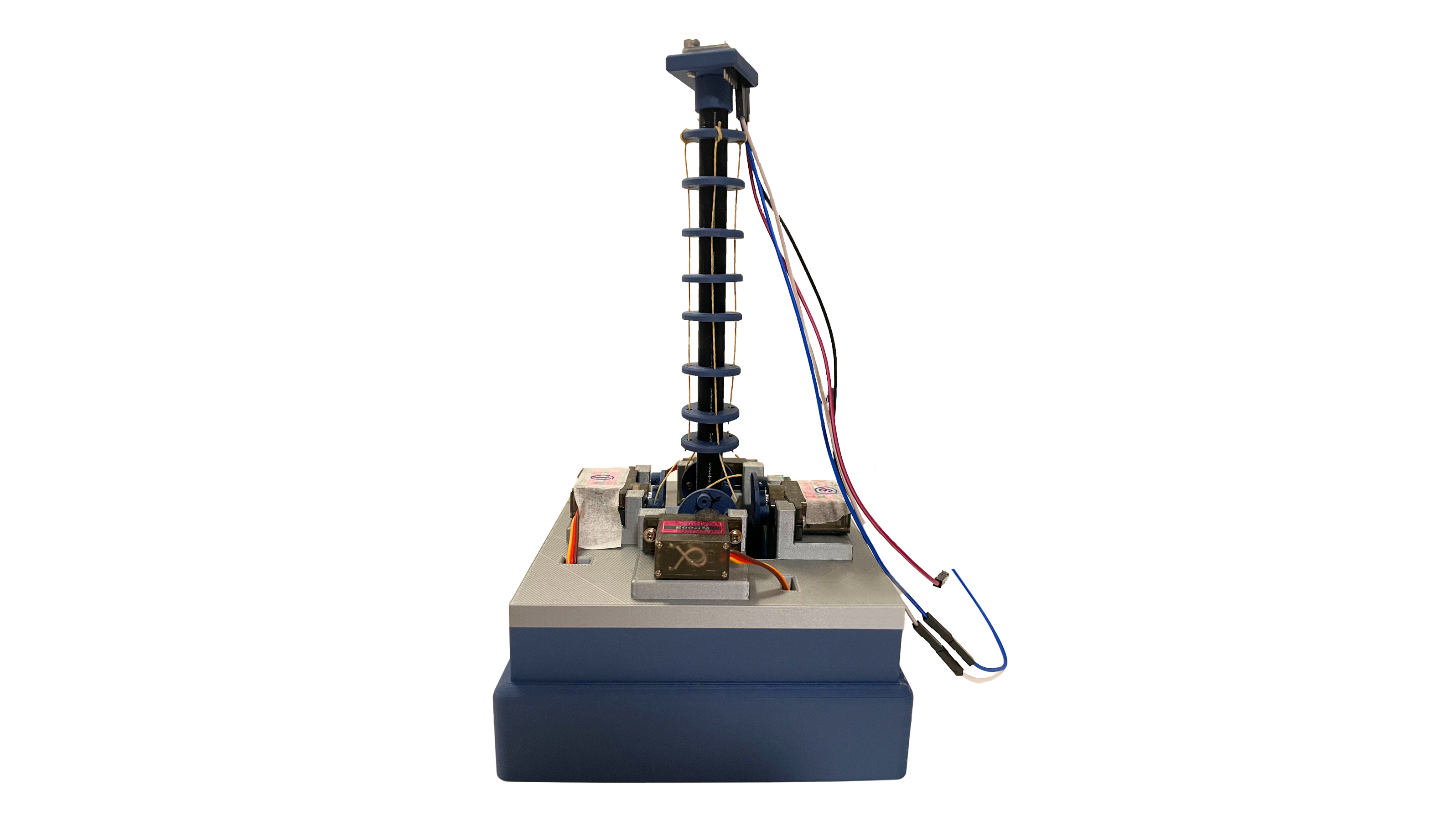
Close up of syringe-servo subassembly for generating vacuum
Results & Operation
The vacuum is generated by a servo powered subassembly, which retracts the plunger of a 20ml plastic syringe.
Reliable pick-and-place functionality was achieved with this set up and a good deal was learned about robotic arm kinematics, controls, and actuation systems in the process.
Key Takeaways
The pneumatic syringe subassembly was useful for this application as it required minimal parts and was much quieter than a traditional vacuum pumps. However, the non-continuous vacuum source that it provided was inferior in that the duration of the gripper's hold on objects with more porous surface finishes was limited, due to loss of seal around the cup-part interface.
A continuous vacuum source would resolve this issue by maintaining constant suction during pick-and-place operations.
Comparison to Traditional Grippers
Video: Preliminary pick & place demo with gripper end effector