Summary of Soft Robotics Lab Work Topics
• Fabrication and Modeling of McKibben and Pneu-Net Soft Actuators
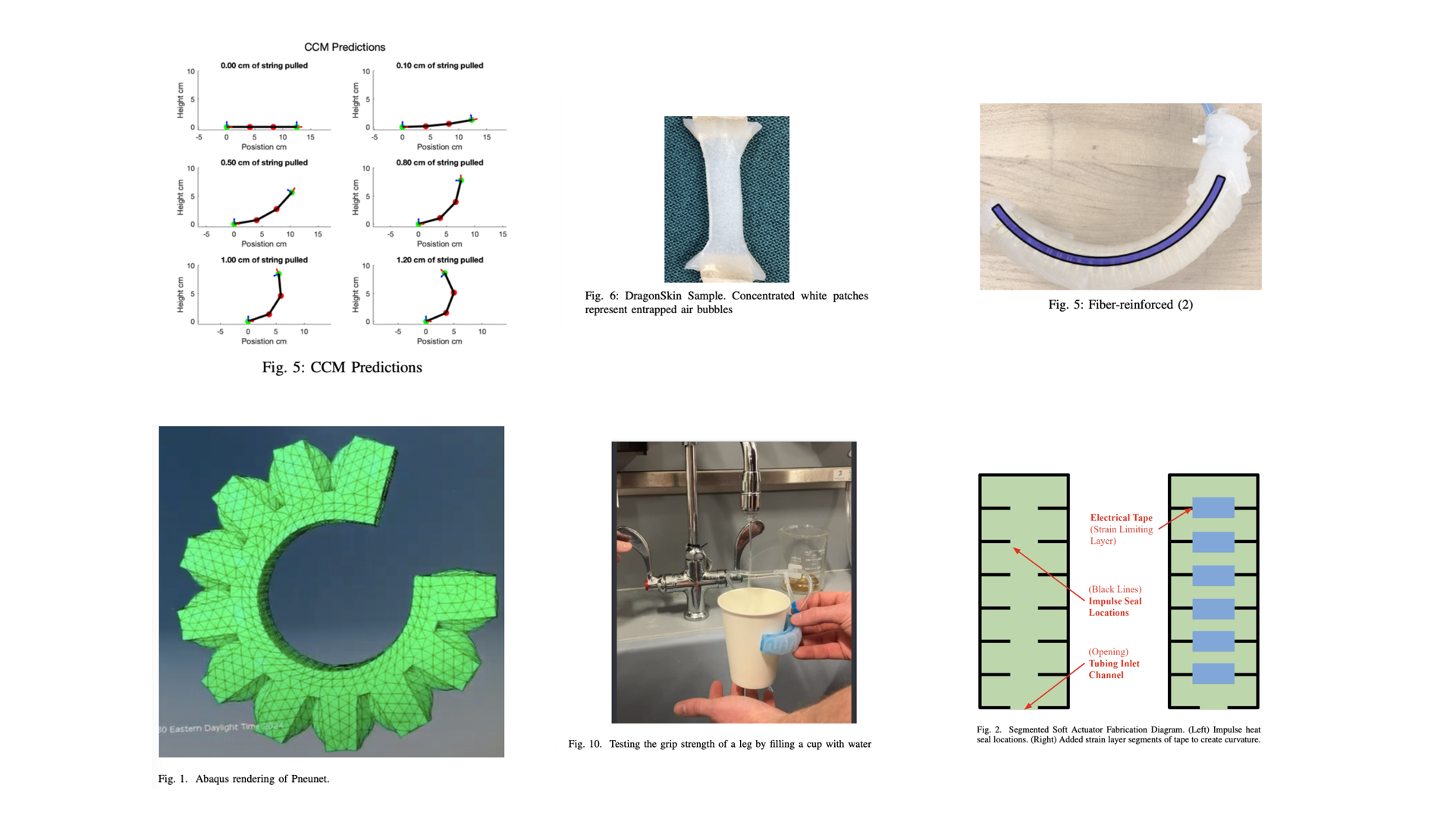
• Constant Curvature Modeling of Silicone Polymers
• Soft Inflatable Actuators Using Thermoplastic Elastomers
• Abacus Simulation of a Pneumatic Soft Actuator
• Constant Curvature Modeling of Silicone Finger
• Design of a Pneumatically-Actuated Soft Robotic Leg for Locomotion
• Constant Curvature Modeling of Silicone Polymers
• Soft Inflatable Actuators Using Thermoplastic Elastomers
• Abacus Simulation of a Pneumatic Soft Actuator
• Constant Curvature Modeling of Silicone Finger
• Design of a Pneumatically-Actuated Soft Robotic Leg for Locomotion
How to Access
Please click the blue button to the right to navigate to an external Dropbox folder of soft robotics lab work. This includes CCM (constant curvature modeling) for several types of soft actuators, as well as fabrication and performance characterization of soft inflatable, fiber reinforced, and others.